★MM-PS26アダブタとPSタイプ受信機と、RCB3などとの3ピンケーブル接続方法
-
KHR-3でRCB4での動作確認。 (KRI-3が必要)
・・★新型(2009/06)KHR-3のRCB4 + KRI-3 + MM-PS26 での通信動作もOK。
KHR-3のロボット用CPUボードRCB4の無線通信ポートは別途購入のKRI-3経由となっているが。
このCPUボードRCB4 + KRI-3 + MM-PS26 でPSコントローラが使えます。
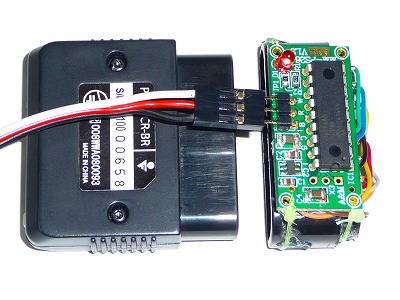
 ・MM-PS26基盤上、3ピンケーブル配線の接続
・MM-PS26基盤上、3ピンケーブル配線の接続画像のように中ほどの3ピン端子側を左置きの場合で、
・左上側にLED
・左中側に3ピン端子、(RCBとの接続用)
3ピンケーブル 上側から白色の信号、赤色の5V、黒色のGND で接続します。
※なお、3ピンケーブルを逆さしで直ぐに壊れることはないはずだが・・
そのままで長くなると良くないし、壊れないともいえないので、ご注意を
□MM-PS26ではアナログスティックの値をデジタルやアナログで出力の4つの動作モードがある。
左右のスティックをデジタルとアナログの別々の設定ができる。
動作モードはプレステPS2用無線コントローラから隠しコマンドで変更する。
モード1: RCB1やRCB3の低速(普通)シリアルモード、左右のスティックはデジタル数値で出力
キーコントロール入力数値を出力する。
モード2: RCB3の拡張シリアルモード、左右のスティックはアナログ数値で出力 (初期値)
左スティックは、RCB3でのPA1〜PA4のアナログ出力値として使う。
モード3: RCB3の拡張シリアルモード、左スティックはアナログ、右スティックはデジタル数値で出力
左スティックは、RCB3でのPA1〜PA2のアナログ出力値として使う。
右スティックは、前後左右キーとしてのデジタル数値を出力。
キーコントロール入力数値を出力する。
モード4: RCB3の拡張シリアルモード、左スティックはデジタル、右スティックはアナログ数値で出力
左スティックは、前後左右キーとしてのデジタル数値を出力。
キーコントロール入力数値を出力する。
右スティックは、RCB3でのPA3〜PA4のアナログ出力値として使う。
□RCB側のソフトウェア設定上の通信・動作モードの設定方法
・RCB1では「低速シリアル」のみで使えます。(モード1)
「HTH」(ハート・トウ・ハート)のオプション設定は、
「送信機でのモーション再生を 有効にする」にチェックを入れて下さい。
「KRC-1から制御する」にチェックを入れて下さい。
RCB3では「低速シリアル」と「拡張低速シリアル」が使えます。
・「低速シリアル」で使われる場合 (モード1)
「HTH」(ハート・トウ・ハート)のオプション設定は、
「送信機でのモーション再生を 有効にする」にチェックを入れて下さい。
「KRC-1から制御する」にチェックを入れて下さい。
・「拡張低速シリアル」で使われる場合 (モード2)〜(モード4)
「HTH」(ハート・トウ・ハート)のオプション設定は、
「送信機でのモーション再生を 有効にする」にチェックを入れて下さい。
「KRC-1から制御する」のチェックを外してください。
・その他の設定は、通常の無線コントローラーと同じです。
○LED表示 動作ステータス
MM-PS26は、RCB3などからの3ピンケーブルで5V電源が通電されると、
・正常動作でLEDが点灯のまま
・受信機を接続で無線コントローラからキー受付中の正常動作中はLEDが点滅する
・低速シリアル中はLEDが0.5秒点滅、拡張低速シリアル中は1秒点滅
・LEDがまったく点灯しない場合は、5V電源が通電されていないのか
または、MM-PS26のマイコンが動作していないか壊れているかの状態となる。
※★★その他、ご不明の点がありましたら、ホームページのお問い合わせアドレスに
お問い合わせをお願いします。(by.miyamiya)